概述
传统引擎多采用 32 位单精度浮点表示世界坐标。当物体远离世界原点(数公里之外)时,浮点精度急剧下降,导致画面抖动、Z-fighting、物理不稳定。这对城市级数字孪生与星球级仿真是致命的。
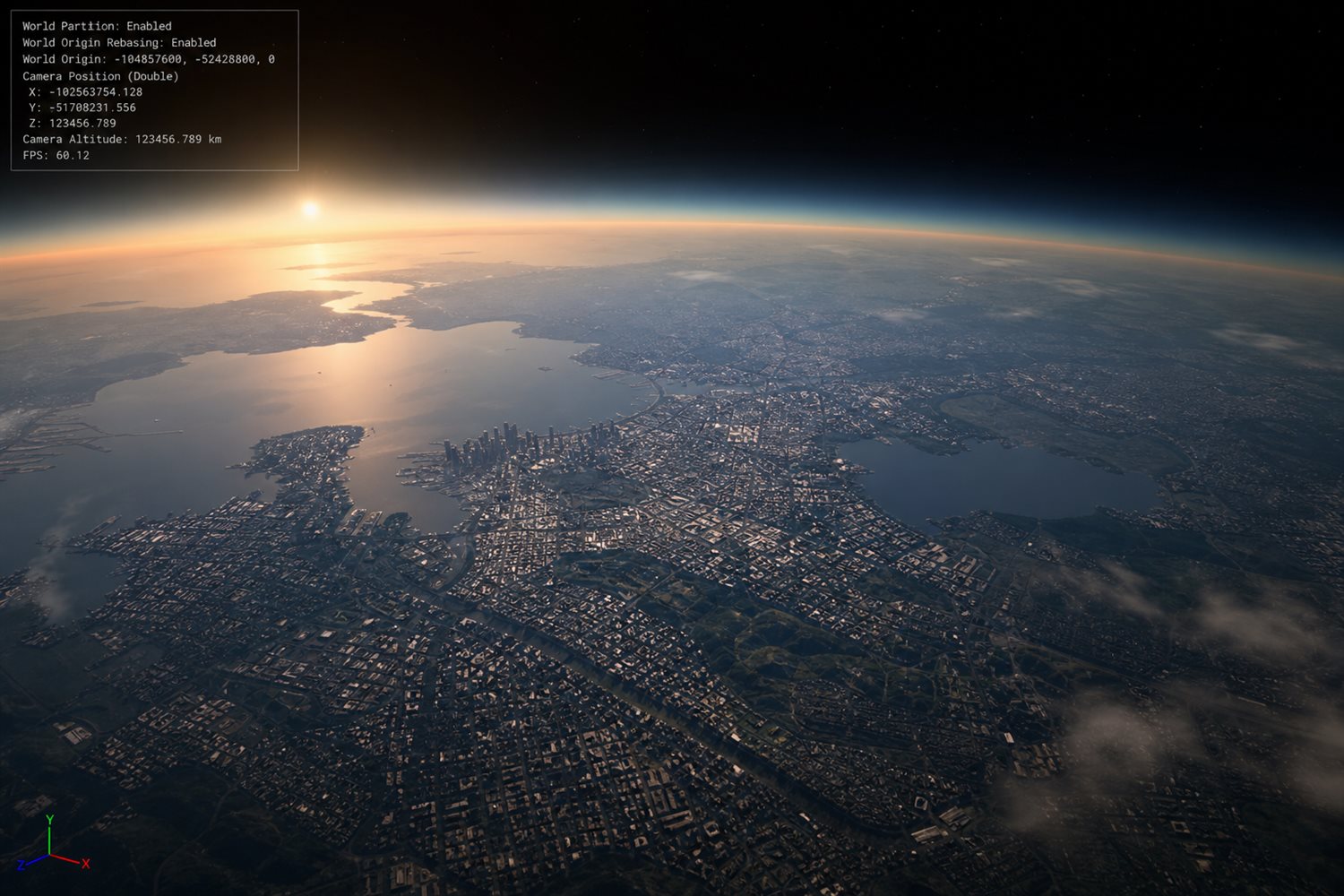
DawnEngine 增强了双精度(64-bit)世界坐标管线,结合相机相对渲染与分区局部坐标策略,使物体无论距离原点多远,都能保持稳定精确的呈现。
核心能力
- 64 位世界坐标:从米级到上万公里尺度保持精度。
- 相机相对渲染:以相机为参考重建局部坐标,规避 GPU 单精度限制。
- 稳定的远景:消除远离原点时的抖动与 Z-fighting。
- 物理一致:高精度坐标同步驱动物理与碰撞,避免大世界下的数值漂移。
适用场景
- 城市 / 园区级数字孪生与可视化。
- 航空航天、地球与星球尺度仿真。
- 与真实地理坐标对齐的 GIS / BIM 融合场景。
协同特性
双精度是大世界的基石,通常与 World Partition 的分区流式加载、Cesium 地理系统 的真实地球坐标协同使用,共同支撑无缝、精确的大尺度世界。